A*算法的名字我在其他各种地方听过不少次了,这次国庆总算有功夫稍微学习一下。我看的教学视频大致讲述了在Unity引擎下实现的A*算法,同时还有一些优化。但是这个系列视频部分episode没有字幕,看的颇慢。不过也有很多收获,记录一下。更好的是,这系列的教程都有 源码可以参考。
A*算是静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。A*算法是一种启发式探索的算法。什么是启发式探索呢?
启发式探索是利用问题拥有的启发信息来引导搜索,达到减少探索范围,降低问题复杂度的目的。
A*法的逻辑概述
算法是点对点之间的寻路算法,因此,将路网划归成网格是一个很容易理解的手法。
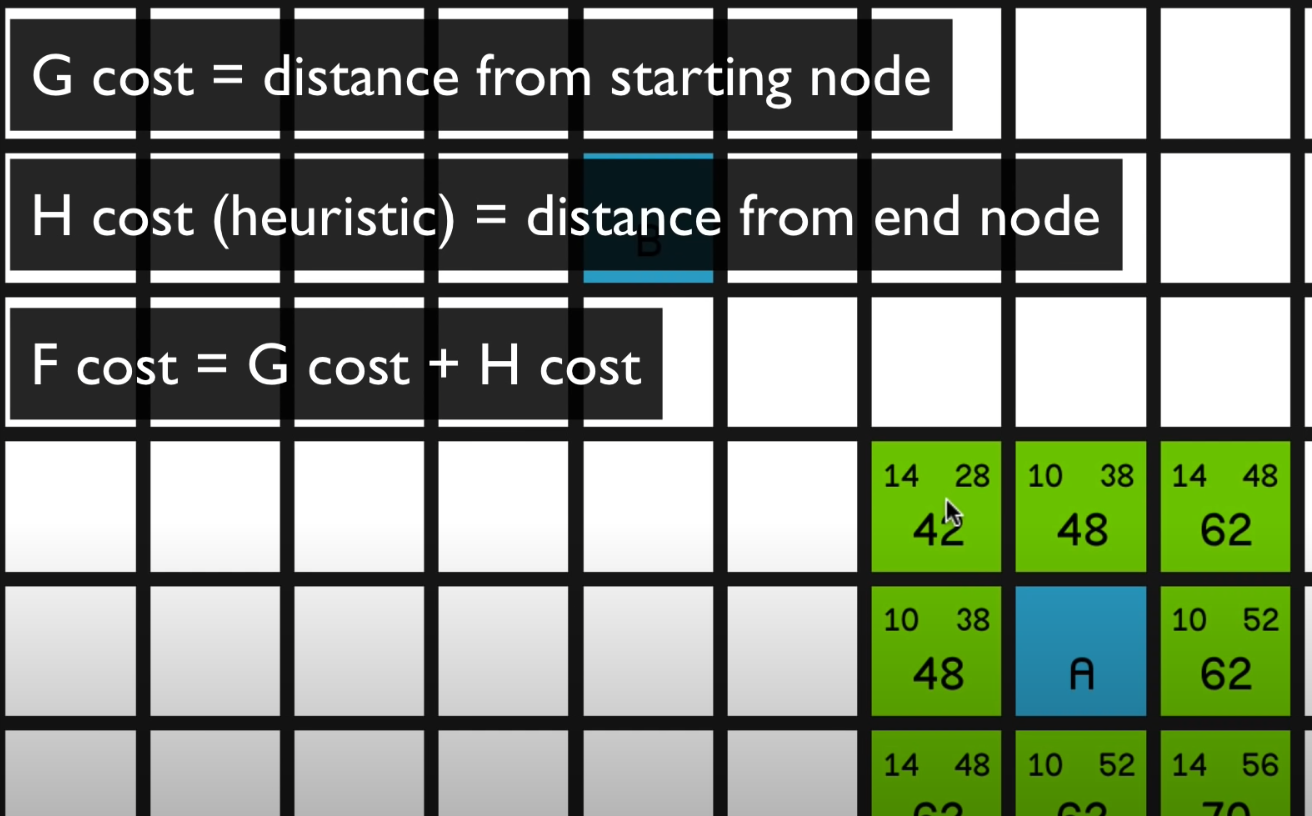
在算法中,每个网格记录三个值。分别是Gcost、Hcost、Fcost。如图所示。Gcost是当前网格与起始网格的距离。Hcost是当前网格到终点网格的距离。Fcost则是Gcost和Hcost的和。
距离可以有欧几里得表示法或者是曼哈顿表示法,这里用符合直觉的欧几里得表示法。即D = sqrt(x1-x2)^2 + (y1-y2)^2)。
有了这三个值,我们就可以进行A*算法的逻辑部分了。A*算法的伪代码如下图。其实看图就很容易理解了,但是还是用文字来描述一下。
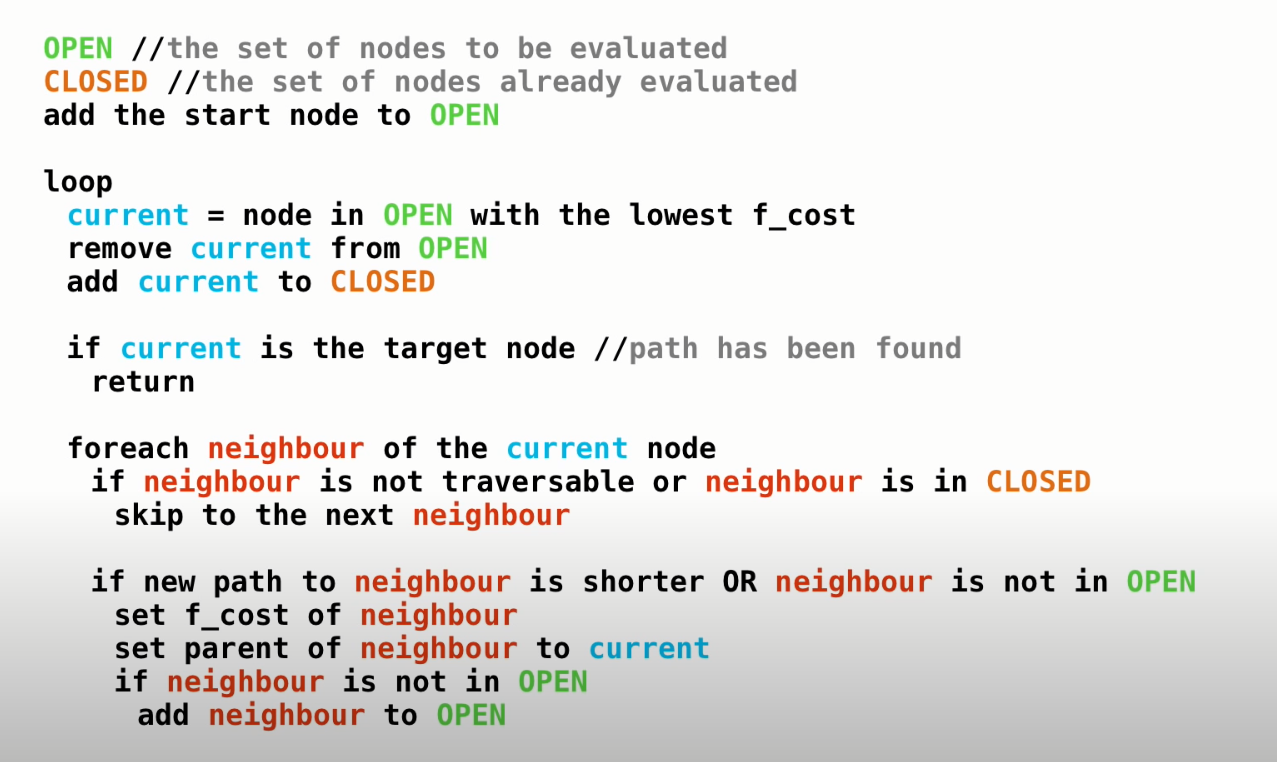
首先,我们需要准备OPEN和CLOSDE两个集合,用来存储网格。随后,将起始网格存入OPEN里。随后,找到OPEN中拥有最小Fcost的网格,设定为current,随后将current网格移出OPEN集合并添加到CLOSED集合中。如果此时的current就是目标网格,那么算法就此结束。如果不是,则要依次判断current所有的相邻网格。判断他们在经过current后,是否有更小的Fcost,若有,则更新数据,并将其parent网格设置为current。当然,还要讲邻居网格添加到OPEN集合中。
经过以上的逻辑,A*算法就能够实现功能了,看上去并不困难,接下去就是实现。
A*算法在Untiy中的实现和表达
建立Node类和grid类
首先,我们需要创建Node类和grid类。用来显示网格和存放节点数据。
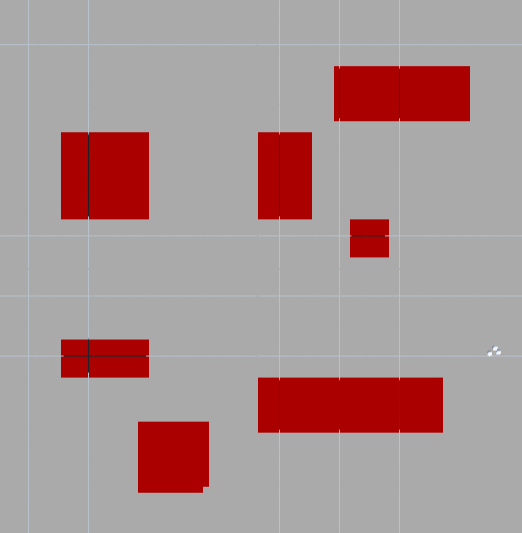
出于某种我不了解的原因,视频作者使用gizmos的方式来显示网格,因此,那些网格只有在scene场景下才能看到。
总之大概的逻辑就是通过3d的物体来创建网格。如下图所示。红色区域为不可通行区域。搭好了框架,接下去就是实现算法的逻辑了。
实现算法
为了实现算法。我们创建了FindPath类。随后是如下代码:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
| void FindPath(Vector3 startPos, Vector3 targetPos) {
Node startNode = grid.NodeFromWorldPoint(startPos);
Node targetNode = grid.NodeFromWorldPoint(targetPos);
List<Node> openSet = new List<Node>();
HashSet<Node> closedSet = new HashSet<Node>();
openSet.Add(startNode);
while (openSet.Count > 0) {
Node node = openSet[0];
for (int i = 1; i < openSet.Count; i ++) {
if (openSet[i].fCost < node.fCost || openSet[i].fCost == node.fCost) {
if (openSet[i].hCost < node.hCost)
node = openSet[i];
}
}
openSet.Remove(node);
closedSet.Add(node);
if (node == targetNode) {
RetracePath(startNode,targetNode);
return;
}
foreach (Node neighbour in grid.GetNeighbours(node)) {
if (!neighbour.walkable || closedSet.Contains(neighbour)) {
continue;
}
int newCostToNeighbour = node.gCost + GetDistance(node, neighbour);
if (newCostToNeighbour < neighbour.gCost || !openSet.Contains(neighbour)) {
neighbour.gCost = newCostToNeighbour;
neighbour.hCost = GetDistance(neighbour, targetNode);
neighbour.parent = node;
if (!openSet.Contains(neighbour))
openSet.Add(neighbour);
}
}
}
}
void RetracePath(Node startNode, Node endNode) {
List<Node> path = new List<Node>();
Node currentNode = endNode;
while (currentNode != startNode) {
path.Add(currentNode);
currentNode = currentNode.parent;
}
path.Reverse();
grid.path = path;
}
int GetDistance(Node nodeA, Node nodeB) {
int dstX = Mathf.Abs(nodeA.gridX - nodeB.gridX);
int dstY = Mathf.Abs(nodeA.gridY - nodeB.gridY);
if (dstX > dstY)
return 14*dstY + 10* (dstX-dstY);
return 14*dstX + 10 * (dstY-dstX);
}
|
基本上就是用C#代码实现了之前提到的伪代码的逻辑。经过这样的操作,我们的寻路就完成了。接下去就是优化性能和功能。
待续…………